Sonatus, in collaboration with the AWS Generative AI Innovation Center, now leverages Amazon Bedrock to revolutionize AI-driven vehicle policy creation. This partnership dramatically reduces the time required to generate complex data collection and automation policies for Software-Defined Vehicles (SDVs), transforming days of manual work into minutes. The innovation addresses significant challenges OEMs face in managing vast vehicle data signals and automating functions.
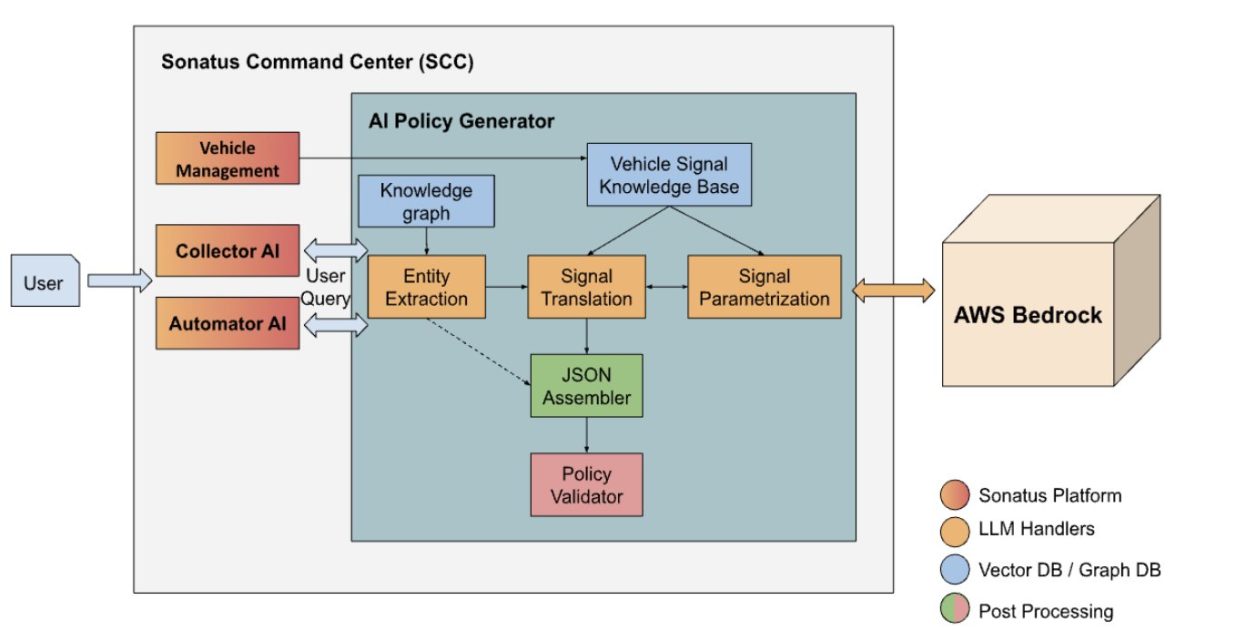
OEM engineers traditionally struggle with thousands of vehicle signals when creating data collection policies for Sonatus Collector AI. Similarly, Automator AI’s no-code workflows for vehicle function automation prove challenging without deep signal knowledge. To overcome these hurdles, Sonatus and AWS developed a natural language interface. This interface uses generative AI to create policies, making the process accessible to both engineers and non-experts.